|
I am a third-year Ph.D. student in the Department of Automation at Tsinghua University, advised by
Prof. Jianjiang Feng and
Prof. Jiwen Lu.
In 2022, I obtained my B.Eng. in the XUTELI School, Beijing Institute of Technology.
Email / CV / Google Scholar / Github |

|
|
|
|
|
|
Wenxuan Guo*, Xiuwei Xu*, Hang Yin, Ziwei Wang, Jianjiang Feng, Jie Zhou, Jiwen Lu International Conference on Computer Vision (ICCV), 2025 [arXiv] [Code] [Project Page] We propose IGL-Nav, an incremental 3D Gaussian localization framework for image-goal navigation. It supports challenging scenarios where the camera for goal capturing and the agent's camera have very different intrinsics and poses, e.g., a cellphone and a RGB-D camera. |
|
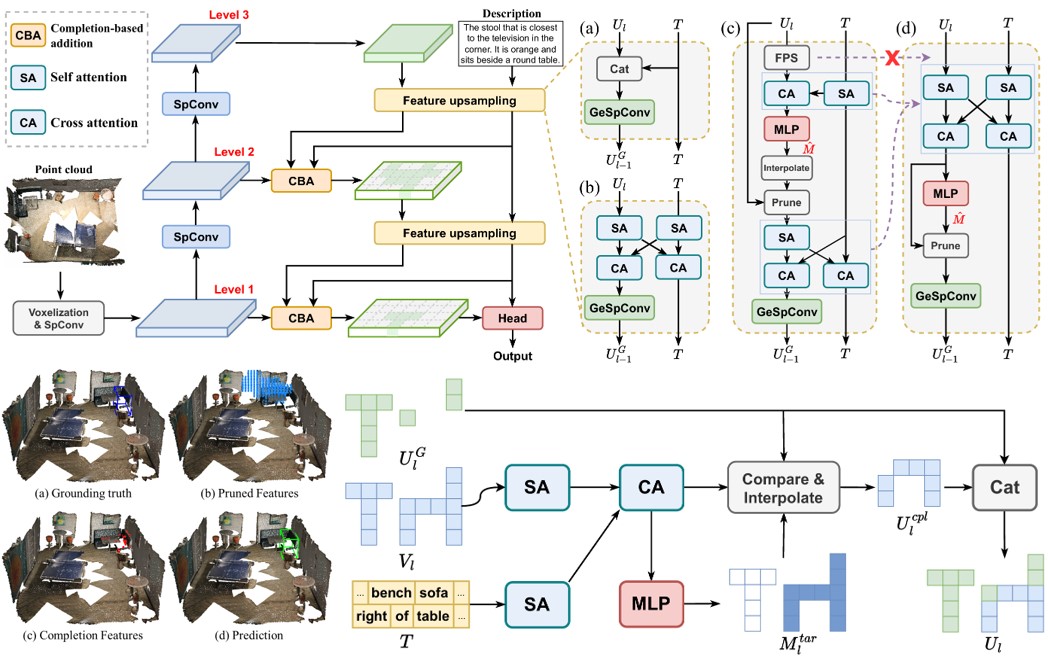
Wenxuan Guo*, Xiuwei Xu*, Ziwei Wang, Jianjiang Feng, Jie Zhou, Jiwen Lu Computer Vision and Pattern Recognition (CVPR), 2025 (Rating: 555) [arXiv] [Code] [中文解读] We propose TSP3D, an efficient multi-level convolution architecture for 3D visual grounding. TSP3D achieves superior performance compared to previous approaches in both accuracy and inference speed. |
|
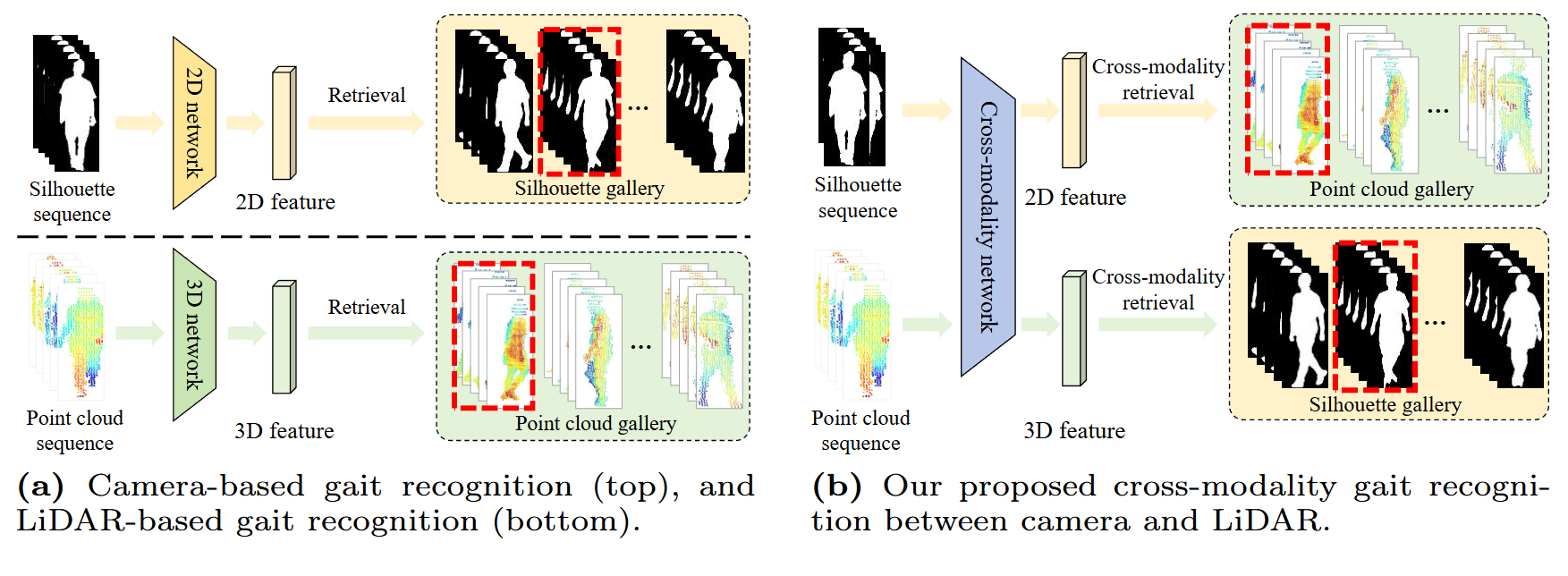
Wenxuan Guo*, Yingping Liang*, Zhiyu Pan, Ziheng Xi, Jianjiang Feng, Jie Zhou European Conference on Computer Vision (ECCV), 2024 [arXiv] [Code] We propose CL-Gait, the first cross-modality gait recognition framework between camera and LiDAR. We propose a contrastive pre-training method to align the feature spaces of the two modalities, along with a large-scale data generation strategy. |
|
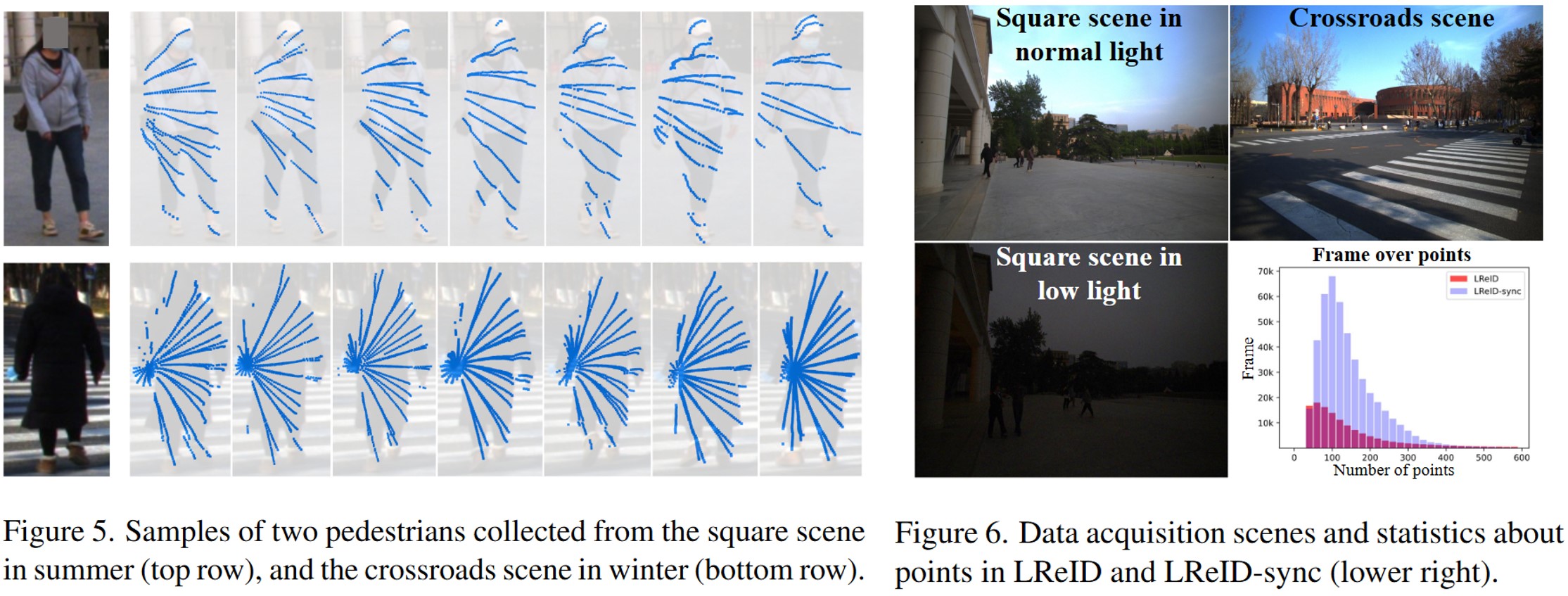
Wenxuan Guo, Zhiyu Pan, Yingping Liang, Ziheng Xi, Zhicheng Zhong, Jianjiang Feng, Jie Zhou Computer Vision and Pattern Recognition (CVPR), 2024 [arXiv] [Code] [中文解读] We propose ReID3D, a LiDAR-based ReID framework that utilizes a pre-training strategy to retrieve features of 3D body shape. Additionally, we build LReID — the first LiDAR-based person ReID dataset, which is collected in several outdoor scenes with natural variations. |
|
|
|
IGL-Nav |
3D Representation for Visual NavigationWe propose incremental 3D Gaussian localization for free-view image-goal navigation in IGL-Nav. We support a challenging application scenario where the camera for goal capturing and the agent's camera have very different intrinsics and poses, e.g., a cellphone and a RGB-D camera. |
|
|